13.4 Blocking vs. Non-Blocking Memory Functions
The malloc and free functions do not allow the calling task to block and wait for memory to become available. In many real-time embedded systems, tasks compete for the limited system memory available. Oftentimes, the memory exhaustion condition is only temporary. For some tasks when a memory allocation request fails, the task must backtrack to an execution checkpoint and perhaps restart an operation. This issue is undesirable as the operation can be expensive. If tasks have built-in knowledge that the memory congestion condition can occur but only momentarily, the tasks can be designed to be more flexible. If such tasks can tolerate the allocation delay, the tasks can choose to wait for memory to become available instead of either failing entirely or backtracking.
For example, the network traffic pattern on an Ethernet network is bursty. An embedded networking node might receive few packets for a period and then suddenly be flooded with packets at the highest allowable bandwidth of the physical network. During this traffic burst, tasks in the embedded node that are in the process of sending data can experience temporary memory exhaustion problems because much of the available memory is used for packet reception. These sending tasks can wait for the condition to subside and then resume their operations.
In practice, a well-designed memory allocation function should allow for allocation that permits blocking forever, blocking for a timeout period, or no blocking at all. This chapter uses the memory-pool approach to demonstrate how to implement a blocking memory allocation function.
As shown in Figure 13.7, a blocking memory allocation function can be implemented using both a counting semaphore and a mutex lock. These synchronization primitives are created for each memory pool and are kept in the control structure. The counting semaphore is initialized with the total number of available memory blocks at the creation of the memory pool. Memory blocks are allocated and freed from the beginning of the list.
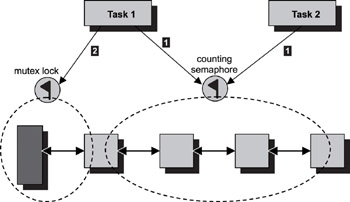
Figure 13.7: Implementing a blocking allocation function using a mutex and a counting semaphore.
Multiple tasks can access the free-blocks list of the memory pool. The control structure is updated each time an allocation or a deallocation occurs. Therefore, a mutex lock is used to guarantee a task exclusive access to both the free-blocks list and the control structure. A task might wait for a block to become available, acquire the block, and then continue its execution. In this case, a counting semaphore is used.
For an allocation request to succeed, the task must first successfully acquire the counting semaphore, followed by a successful acquisition of the mutex lock.
The successful acquisition of the counting semaphore reserves a piece of the available blocks from the pool. A task first tries to acquire the counting semaphore. If no blocks are available, the task blocks on the counting semaphore, assuming the task is prepared to wait for it. If a resource is available, the task acquires the counting semaphore successfully. The counting semaphore token count is now one less than it was. At this point, the task has reserved a piece of the available blocks but has yet to obtain the block.
Next, the task tries to lock the mutex. If another task is currently getting a block out of the memory pool or if another task is currently freeing a block back into the memory pool, the mutex is in the locked state. The task blocks waiting for the mutex to unlock. After the task locks the mutex, the task retrieves the resource from the list.
The counting semaphore is released when the task finishes using the memory block.
The pseudo code for memory allocation using a counting semaphore and mutex lock is provided in Listing 13.1.
Listing 13.1: Pseudo code for memory allocation.
Acquire(Counting_Semaphore)
Lock(mutex)
Retrieve the memory block from the pool
Unlock(mutex)
The pseudo code for memory deallocation using a mutex lock and counting semaphore is provided in Listing 13.2.
Listing 13.2: Pseudo code for memory deallocation.
Lock(mutex)
Release the memory block back to into the pool
Unlock(mutex)
Release(Counting_Semaphore)
This implementation shown in Listing 13.1 and 13.2 enables the memory allocation and deallocation functions to be safe for multitasking. The deployment of the counting semaphore and the mutex lock eliminates the priority inversion problem when blocking memory allocation is enabled with these synchronization primitives. Chapter 6 discusses semaphores and mutexes. Chapter 16 discusses priority inversions.