16.3.3 Deadlock Recovery
After deadlock is detected, the next step is to recover from it and find ways to break the deadlock. No one magic solution exists to recover from deadlocks. Sometimes it is necessary to execute multiple recovery methods before resolving a deadlock, as illustrated later.
For preemptible resources, resource preemption is one way to recover from a deadlock. The deadlocked set is transferred to the recovery algorithm after the detection algorithm has constructed the set. The recovery algorithm can then exercise preemption by taking resources away from a task and giving these resources to another task. This process temporarily breaks the deadlock. The latter task can complete execution and free its resources. These resources are used in turn to satisfy the first task for its completion. Resource preemption on preemptible resources does not directly affect the task's execution state or result, but resource preemption can affect a task's timing constraints. The duration of resource preemption can cause the preempted task to abort, which results in an incomplete execution and indirectly affects the result of a task.
For non-preemptible resources, resource preemption can be detrimental to the preempted task and can possibly affect the results of other tasks as well. For example, consider the situation in which one task is in the midst of writing data into a shared memory region, while at the same time a second task requests read access from the same memory region. The write operation is invalidated, when another task causes a deadlock, and the system recovers from the deadlock by preempting the resource from the writing task. When the second task gets the resource and begins accessing the shared memory, the data read is incoherent and inconsistent. For this reason, a shared memory region is classified as a non-preemptible resource. The preempted task writes the remaining data when the access to the shared memory is returned. The data is no longer useful, and the write operation is wasted effort. Sometimes this type of resource preemption is as good as eliminating the preempted task from the system altogether.
On the other hand, the effects of non-preemptible resource preemption can be minimized if a task has a built-in, self-recovery mechanism. A task can achieve self-recovery by defining checkpoints along its execution path. As soon as the task reaches a checkpoint, the task changes a global state to reflect this transition. In addition, the task must define a specific entry point to be invoked by the deadlock recovery algorithm after the task is allowed to resume execution. The entry point is nothing more than the beginning of the task's built-in, self-recovery routine. In general, the recovery involves rolling back and restarting execution from the beginning of the previous checkpoint. The concept is illustrated in Listing 16.1.
Listing 16.1: Checkpoints and recovery routine.
recovery_entry()
... {
switch (state)
... {
/* reached checkpoint #1 */ case CHECKPOINT_1:
state = CHECKPOINT_1; recovery_method_1();
... break;
case CHECKPOINT_2:
... recovery_method_2();
/* reached checkpoint #2 */ break;
state = CHECKPOINT_2; ...
}
... }
In Listing 16.1, a resource preemption is performed on a writer task and the preempted resource is given to the reader task. The writer task's self-recovery involves returning to the previous checkpoint and perhaps repeating the write operation, followed by a broadcast notification to all other tasks that the shared memory region has just been updated. This process can reduce the impact on other tasks.
The reassignment target of the preempted resource plays an important role in breaking the deadlock. For example, assume the deadlocked set {T1, R2, T2, R4, T3, R5, T5, R3} has been discovered, as shown in Figure 16.3. In addition, suppose resource R2 is preempted from T2 as the first recovery step. Figure 16.4 shows the resource graph if R2 were reassigned to T3.
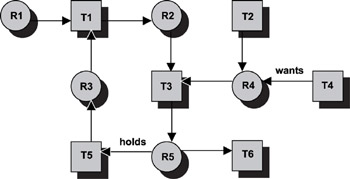
Figure 16.4: Resource preemption with a new deadlock.
The problem is not solved because a new deadlock is formed by this resource assignment. Instead, if R2 were given to T1 first, the deadlock is broken as shown in Figure 16.5.
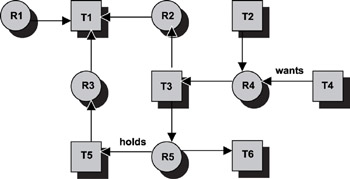
Figure 16.5: Deadlock eliminated by proper resource reassignment.
Consequently, T1 can complete and then frees R1, R2, and R3. This process in term enables T5 to complete and releases R5. Now, both R2 and R5 are available to T2, which allows it to run to completion. Finally, T2 is given a second chance to execute, and the deadlock is eliminated by proper resource reassignment.